- 海宝公司邵经理:
177-5158-3908














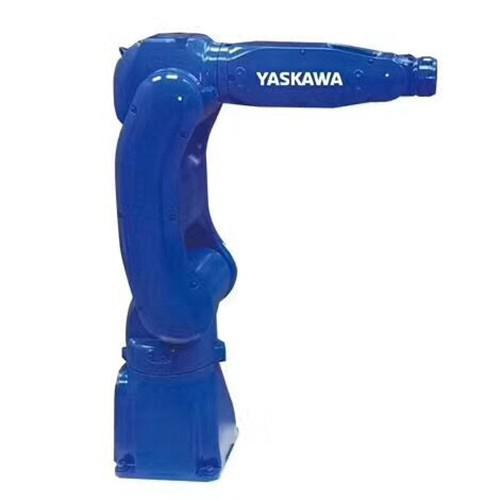
安川机床上下料机器人机械手MH12
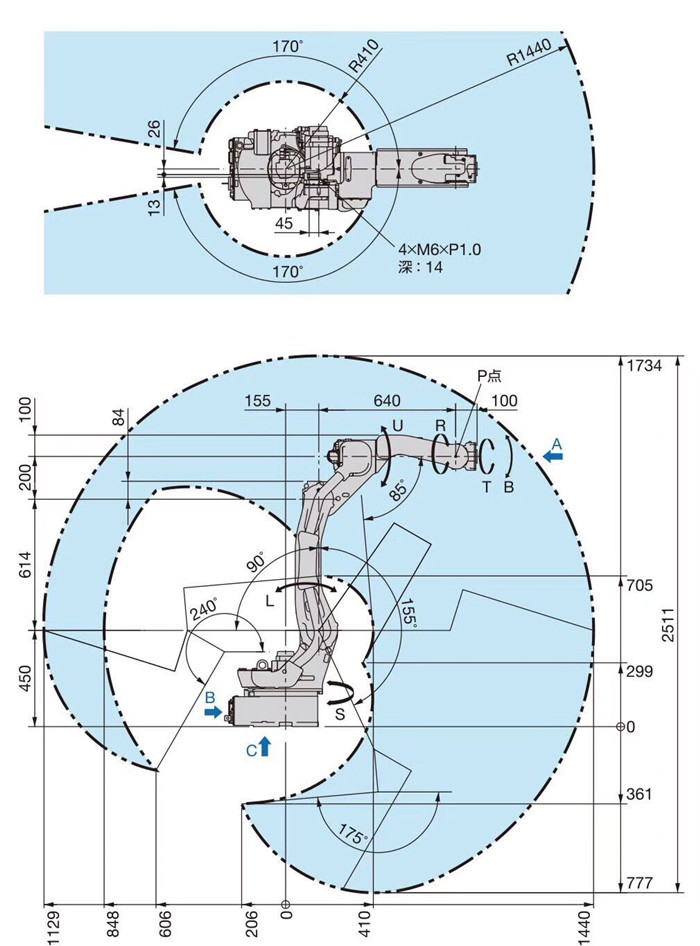
- 机器人型号: 安川 MH12 自由度: 6 水平伸长度: 1440mm 可搬质量: 12kg 本体质量: 130kg 重复定位精度: ±0.08mm 安装方式: 置地式、挂壁式、倒挂式 用途: 搬运、码垛、组装/分装、喷涂……
- 技术及商务咨询:邵经理 177-5158-3908
安川机床上下料机器人机械手MH12:

安川机器人简介:
同级别非常高速性能工业机器人,实现流线手臂设计及中空电缆。
6轴垂直多关节
负载:12Kg
动态范围:1440mm
控制柜:DX200
用途:搬运、码垛、组装/分装、喷涂
特性:
1. 可搬质量12KG,同级别中非常快速。
可搬重量为12KG的新型多功能通用型机器人新成员。实现同级别非常高速动作,提升生产力。
2. 中空手臂构造可内藏缆线。
采用中空式上臂(U臂)。可将缆线内置于手臂中,减小由于干涉而导致的动作限制。
机器人示教更容易,减少因干涉而导致的缆线断裂的故障排查,更易维护。
3. 采用流线型手臂构造。
在新型弧焊机器人上使用的流线型手臂同样适用于多功能通用型机器人。降低与夹具或工件 的干涉区域,在搭载大型旋转工件时发挥的效果尤为明显。
参数:
机器人型号 | MH12 | |
适用控制柜 | DX200 | |
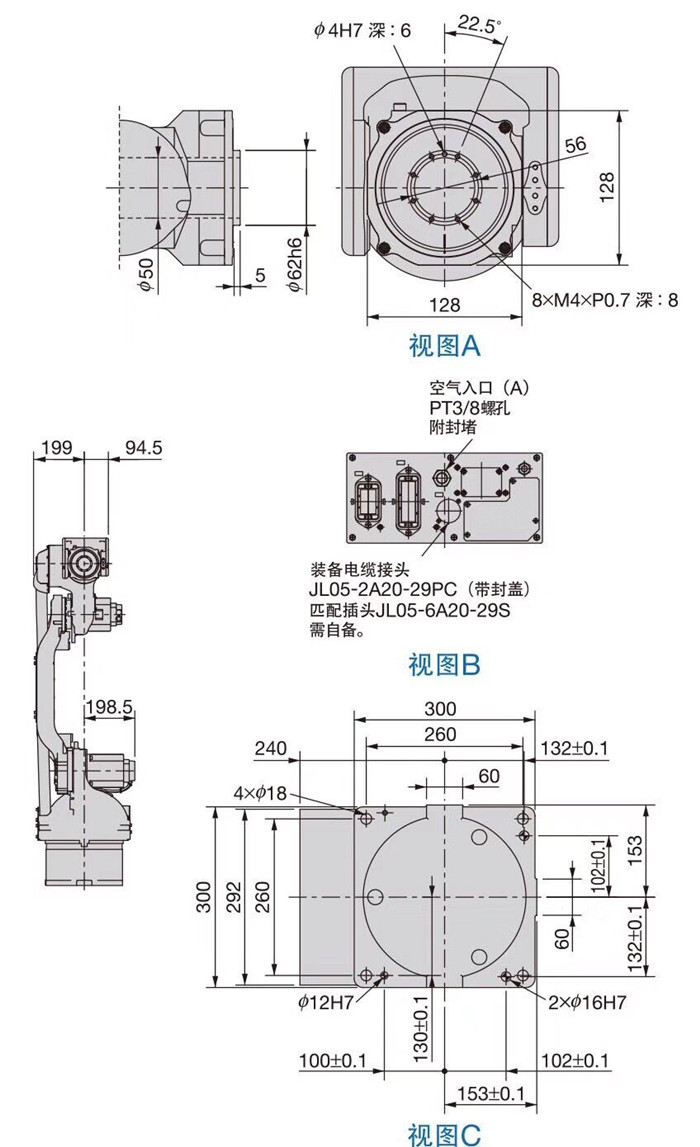
设置*1 | F,W,C | |
自由度 | 6 | |
可搬质量 | 12kg | |
垂直伸长度 | 2511mm | |
水平伸长度 | 1440mm | |
重复定位精度*2 | ±0.08mm | |
动作范围 | S轴(旋转) | -170° ~ +170° |
L轴(下臂) | -90° ~ +155° | |
E轴(肘) | - | |
U轴(上臂) | -175° ~ +240° | |
R轴(手腕旋转) | -180° ~ +180° | |
B轴(手腕摆动) | -135° ~ +135° | |
T轴(手腕回转) | -360° ~ +360° | |
非常大速度 | S轴(旋转) | 220°/s |
L轴(下臂) | 220°/s | |
E轴(肘) | - | |
U轴(上臂) | 220°/s | |
R轴(手腕旋转) | 410°/s | |
B轴(手腕摆动) | 410°/s | |
T轴(手腕回转) | 610°/s | |
容许力矩 | R轴(手腕旋转) | 22N.m |
B轴(手腕摆动) | 22N.m | |
T轴(手腕回转) | 9.8N.m | |
容许惯性力矩 | R轴(手腕旋转) | 0.65kg.m2 |
B轴(手腕摆动) | 0.65kg.m2 | |
T轴(手腕回转) | 0.17kg.m2 | |
本体质量 | 130kg | |
电源容量*3 | 1.5kVA | |
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:只限搬运用途。
*5:超过1KG的情况因动作范围有异。请根据对应的负载使用正确的动作范围。
*6:MH6F的时候是1.0kVA。
*7:HP20F的时候是1.5kVA。
*8:斜线部分表示的是S轴在-40° ~ +30°的时候P点无法动作的范围。