- 海宝公司邵经理:
177-5158-3908







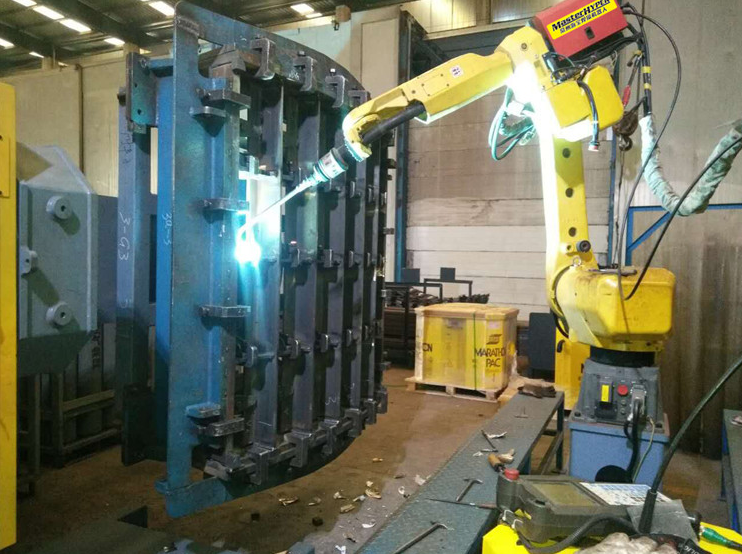







拖拉机架焊接机器人
- 常州市海宝焊割有限公司是国内先进的焊接机器人和等离子切割的生产厂家,作为高新技术企业和江苏省焊接装备工程技术研究,常州市海宝焊割有限公司一直保持行业内的市场和技术先进地位,并以自身的技术实力和完善的服务保障体系服务于工程机械、机车车辆、煤矿机械、锅炉、石化、食品医药、管道建设、电力建设等行业。海宝公司和世界著名的机器人厂商KUKA和FANUC强强合作,致力于中厚板结构件制造领域的机器人焊接系统的应用和工艺推广,针对用户的具体情况量身定制,提供给用户性价比高的焊接机器人以及等离子切割机系统。非常优秀的解决案例,联系邵经理:17751583908
- 技术及商务咨询:邵经理 177-5158-3908
海宝公司导航页:ABB机器人 发那科机器人 OTC机器人 安川机器人
一.系统方案概述
1.1 方案设计依据及准则
(1)甲方所提供的被焊工件照片、图纸及相关要求。
(2) 以产品的工艺分析和工艺流程的合理性为基础,力求高柔性、高性价比、高可靠性,并且日后可扩 展升级 。
1.2 被焊工件及焊接机器人要求
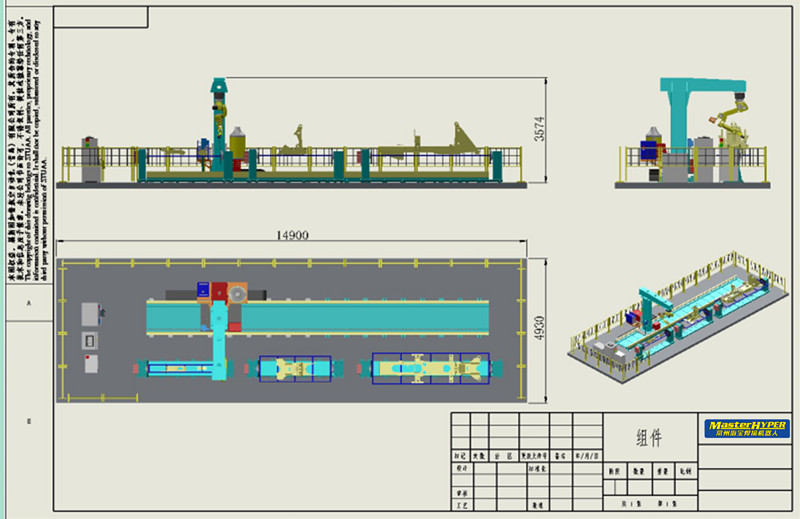
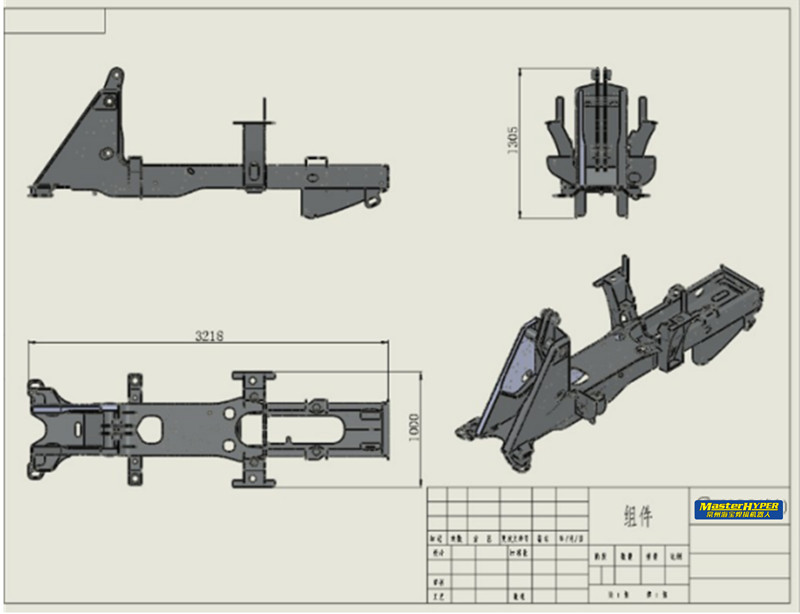
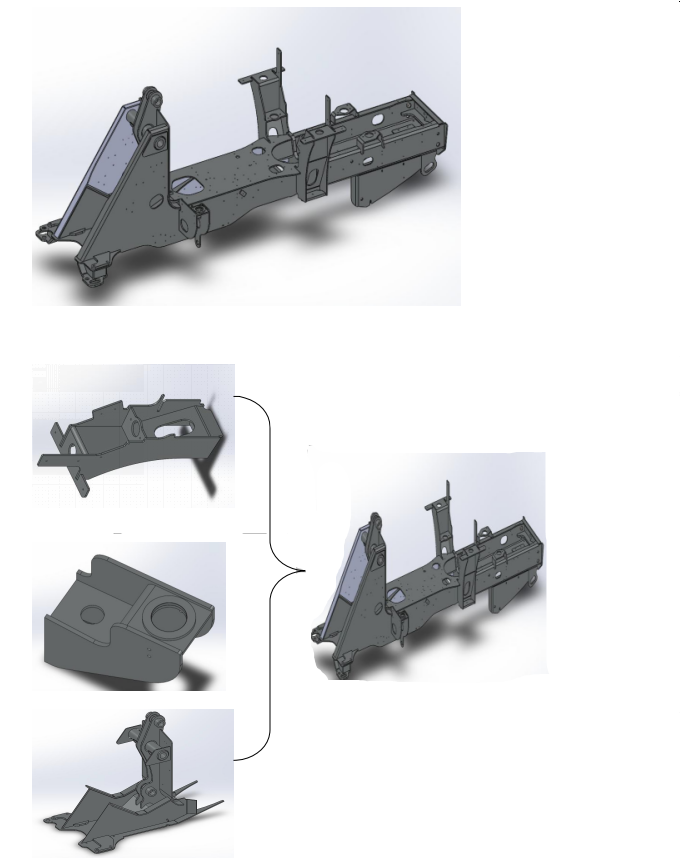
1.1 工件外形图如下
工件的焊接要求:
(1) 气体保护焊接(MAG)。
(2) 焊接牢固,无设备自身原因导致的夹渣、裂纹、咬边、漏焊等焊接缺陷。
(3) 焊缝均匀平整、无焊瘤等外观缺陷。
(4) 焊缝尺寸应符合图纸及技术要求 。
(5) 焊接完毕,工件不得有较大变形量.
1.3 工序及工艺路线的划分
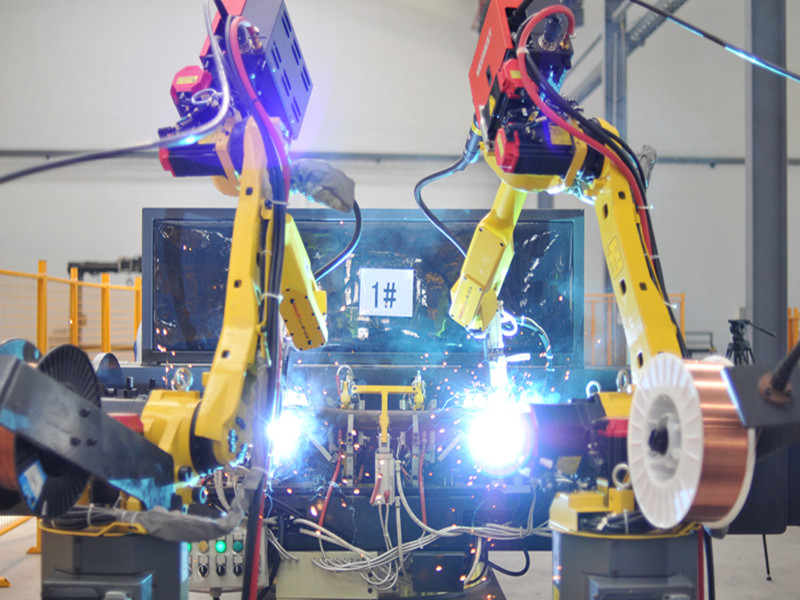
工序: 产品分四序焊接,
第1序焊接产品:放在 1 号变位机上面焊接。第2序焊接产品:放在 1 号变位机上面焊接,第三序焊接产品:放在 2 号变位机上面焊接,第四序焊接产品(拖拉机架总成焊接):放在 3 号变位机上面焊接
![]() 人工点固工件→手工搬运工件至焊接变位机→手动夹紧工件-→焊接零部件工件 1→焊接零部件工件 2→焊 接零部件工件 3→焊接拖拉机架总成工件 4→ 焊接工件结束-→机器人复位→ 卸下工件→工件机器人焊接程序 结束→人工补焊工件→工件焊接结束。
人工点固工件→手工搬运工件至焊接变位机→手动夹紧工件-→焊接零部件工件 1→焊接零部件工件 2→焊 接零部件工件 3→焊接拖拉机架总成工件 4→ 焊接工件结束-→机器人复位→ 卸下工件→工件机器人焊接程序 结束→人工补焊工件→工件焊接结束。
工艺: 操作人员按下操作盒上的启动按钮,滑台上的焊接机器人移动到变位机上方,机器人夹持焊枪到达焊缝始
端开始焊接,在焊接过程中焊接机器人可根据焊接速度在滑台上进行移动(滑台电机为外部联动轴,可与焊接 机器人协同),使得工件上的焊缝有利于机器人的焊接作业,焊接结束,机器人复位。
变位机带动工件适时翻转,以适应工件的对称焊接等焊接要求,减少工件焊接变形。 机器人弧焊软件包:
机器人带有起始点寻位功能。该功能具备接触传感功能,具有自动寻找焊缝起始位置的功能,从而解决工 件初始定位偏差问题。
机器人带有电弧跟踪功能。能够自动补偿由于工件的不一致性、焊接变形带来的偏差,电弧跟踪需要在摆焊 和 200A 电流以上等特定要求下使用效果更佳。
焊接工艺特点:通过触碰寻位对于其中特征位置的焊缝集中进行寻位;按照工艺需求,遵循焊接应力变化、
表面要求及焊接可达性要求,依次进行焊接;焊接过程中,部分关键尺寸进行必要的二次寻位,以保证起弧位 置准确。并利用变位机大幅反转的间隙,设置程序,进行清枪剪丝喷硅油的工作。
焊接工艺的分析
(1)工件参数条件
l 工件材料:碳钢;
l 工件尺寸:3118X1305 X 1000mm;
l 工件图纸:拖拉机架。
l 焊缝形式:角焊缝 、对接焊接等。
l 工件重量:<1500Kg。
(2)焊接工艺条件
l 采用气体保护电弧焊接( MAG ).
l 工件不应被油、锈等污染。
l 组对要求:焊缝位置偏差≤5mm,组对间隙≤2mm;
l 保证工件的组对精度符合技术协议要求。
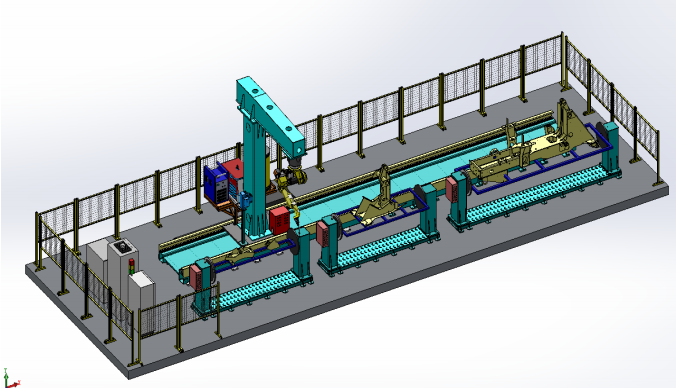
二.机器人焊接系统概述
2.1 机器人焊接系统概述
本机器人焊接系统可以 24 小时连续作业,跟人工作业相比,其效率、质量、稳定性等有很大提高。 该系统配置主要由 1 台弧焊机器人、1 套美国林肯焊接电源、3 套单轴头尾架焊接变位机、1 套机器人水冷![]() 焊枪系统、1 套机器人地轨 C 型梁滑台系统、1 套清枪剪丝装置、4 套工装夹具、1 套集成控制系统等组成。 整套焊接机器人系统特点: 1、该机器人焊接系统带有起始点寻位、电弧跟踪、多层多道等弧焊软件包的功能,可以有效解决工件组対误差问题。工件采用分四序焊接的方式,可以显著提高工件的可焊率,减少人工的补焊量。
焊枪系统、1 套机器人地轨 C 型梁滑台系统、1 套清枪剪丝装置、4 套工装夹具、1 套集成控制系统等组成。 整套焊接机器人系统特点: 1、该机器人焊接系统带有起始点寻位、电弧跟踪、多层多道等弧焊软件包的功能,可以有效解决工件组対误差问题。工件采用分四序焊接的方式,可以显著提高工件的可焊率,减少人工的补焊量。
2.2 机器人焊接系统集成设备配置表
表 2-1 机器人焊接系统集成设备配置表
序号 | 名 称 | 规 格 | 品 牌 | 数量 | 单位 | 备注 | |||
1 | 焊接机器人(包含本 体、控制柜、示教器 及集成线缆) | M-10iA/8L | FANUC(发那 科) | 1 | 套 | 全球 3 大一线机器人品牌之一,臂 展 2028mm,负载 8Kg,内置焊枪 | |||
2 | 弧焊软件包(起始点 寻位,电弧跟踪功能、 多层多道) | 1 | FANUC/林肯 | 1 | 套 | ||||
3 | 焊接电源 | 455M STT | 林肯(美国) | 1 | 台 | 欧美第一品牌,额定电流 500A | |||
4 | 机器人焊枪(液冷) | 82W | TBI | 1 | 套 | 带夹丝功能 | |||
5 | 循环水箱 | MasterHyper 海宝 | 1 | 套 | |||||
6 | 防碰撞传感器 | TBI | 1 | 套 | |||||
7 | 清枪器 | MasterHyper | MasterHyper 海宝 | 1 | 套 | ||||
8 | 机器人地轨 C 型梁滑 台系统 | MasterHyper 海宝 /FANUC | 1 | 套 | 外部一轴,有效行程 10 米 | ||||
9 | 焊接变位机一 | 单轴头尾架 | MasterHyper 海宝 | 2 | 套 | 外部一轴, 负载 500Kg | |||
10 | 焊接变位机二 | 单轴头尾架 | MasterHyper 海宝 | 1 | 套 | 外部一轴, 负载 2000Kg | |||
11 | 工装夹具 | 手动夹具 | MasterHyper 海宝 | 4 | 套 | ||||
12 | 系统集成及控制 | MasterHyper 海宝 | 1 | 套 | |||||
13 | 安全防护 | MasterHyper 海宝 | 1 | 套 | |||||
14 | 安装调试及培训 | MasterHyper 海宝 | 1 | 期 | |||||
15 | 配件 | MasterHyper 海宝 | 1 | 套 | 详见清单 | ||||
16 | 运输及保险 | MasterHyper 海宝 | 1 | 次 | |||||
2.3 设备演示图