
- 海宝公司邵经理:
177-5158-3908









- 海宝公司-邵经理
177-5158-3908

- 固定电话:
0519-88370668

- 传真号码:
0519-88770167

- 公司邮箱:
472846530@qq.com

- 公司地址:
江苏省常州市武进横林迎宾路129号
铝模板机器人焊接系统技术方案书
已阅读 4231 次01/14/2018海宝公司导航页:ABB机器人 发那科机器人 OTC机器人 安川机器人
常州海宝焊接机器人机械手在铝模板自动焊接设备 自动化焊接铝合金模板 铝合金电池安装盒焊接机器人工作站 铝模板自动焊接专机 铝合金托盘焊接机器人视频案例 铝合金模板机器人自动焊接项目 铝合金模板抛丸喷砂设备:
铝模板机器人焊接系统技术方案书(一)
一、铝模板自动焊接系统方案概述6
1.铝模板自动焊接方案设计依据及准则6
2.工件及焊接要求6
二、机器人焊接单元概述7
1.机器人铝模板自动焊接焊接系统概述7
2.机器人焊接系统集成设备配置表7
3.铝模板自动焊接设备演示图如下8
4.操作流程10
三、机器人焊接工作站主要设备技术参数及特点说明10
1.选用全球3大一线品牌之一的FANUC 焊接机器人10
2.焊接电源15
3.工装夹具20
4.机器人焊枪21
5.循环水箱22
6.集成控制系统22
四、铝模板自动焊接设备技术条件23
1. 铝模板自动焊接设备工作环境23
2. 铝模板自动焊接设备颜色23
五、技术资料23
六、铝模板自动焊接设备的安装调试、质量保证期和售后服务23
七、 其他23

项目名称:铝模板机器人焊接系统
需方:
供方:常州市海宝机器人有限公司
一、系统方案概述
1. 方案设计依据及准则
1.1 甲方所提供的被焊铝模板工件照片、图纸及相关技术要求。
1.2 以铝模板产品的焊接工艺分析和铝合金机器人焊接工艺流程的合理性为基础,力求高柔性、高性价比、高可靠性,并且日后可扩展升级 。
2.铝模板工件及焊接要求
2.1铝模板工件实物图如下

2.2铝模板工件的焊接要求:
2.2.1 气体保护电弧焊接(MIG、MAG)。
2.2.2 焊接牢固,无设备自身原因导致的气孔、夹渣、裂纹、咬边、漏焊等焊接缺陷。
2.2.3 焊缝均匀平整、无焊瘤等外观缺陷。
2.2.4 焊缝尺寸应符合图纸及技术要求 。
2.3工件参数条件
1)工件材料:铝合金;
2)材料厚度:3-6MM;
3)焊缝形式:平焊、角焊缝。
4)工件重量:小于50kg
5)工件外形尺寸:固定型号,参考图纸。
2.4焊接工艺条件
1)高纯氩气体保护。
2)铝模板机器人焊接工件不应被油、锈等污染。
3) 保证铝模板机器人焊接工件原材料的下料精度及组对精度符合技术协议及图纸要求。
二、 机器人焊接单元概述
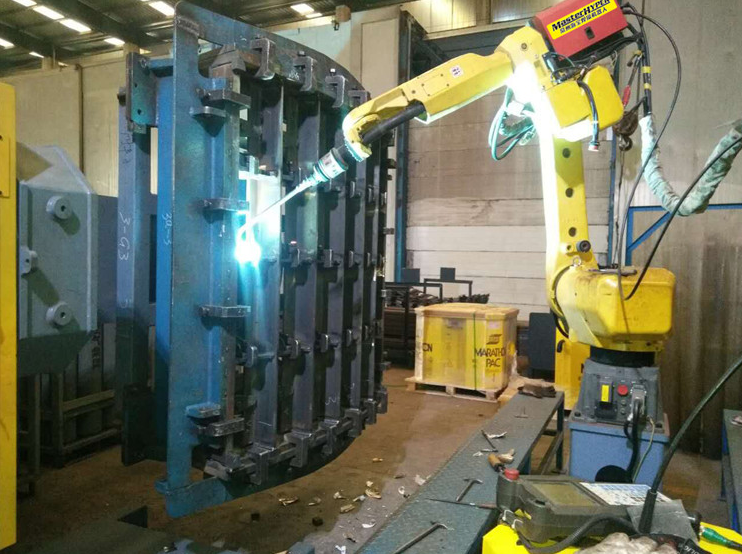
1.机器人焊接系统概述:
本发那科机器人焊接单元可以24小时连续作业,跟人工作业相比,其效率、质量、稳定性等有很大提高。同时MasterHyper公司提供的该款机器人产品具备后续升级扩展能力,预留30多个IO 接口以备后续升级。
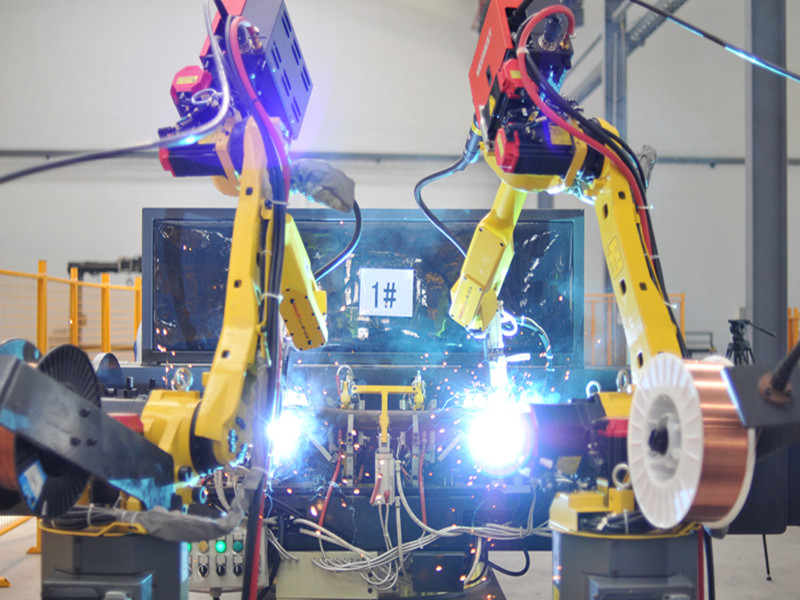
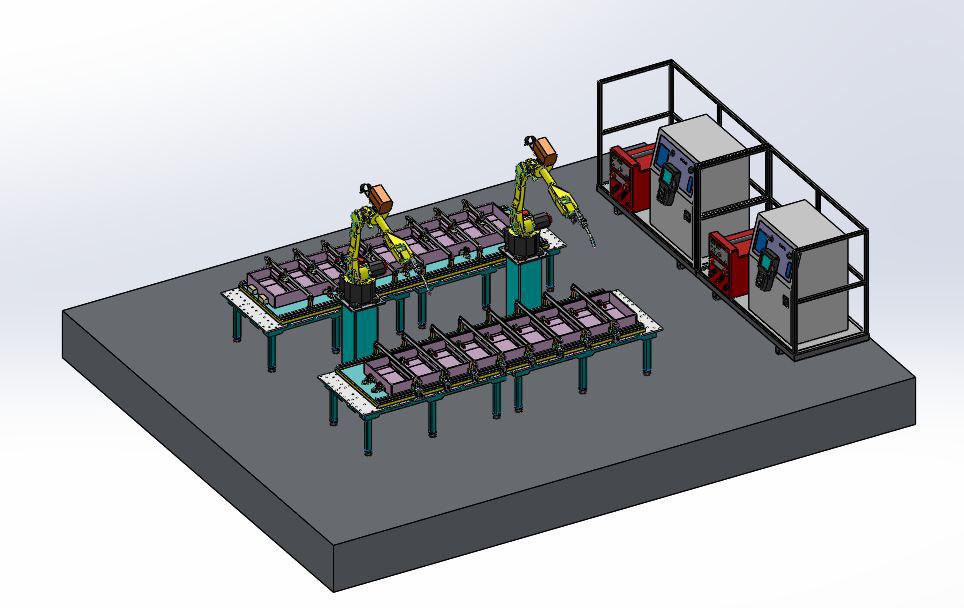
该系统为双机器人焊接系统,工位工装夹具上实现工件的点焊组对和焊接,确保工件能匹配焊接,以最大化提高机器人生产效率。
系统配置主要由两台进口焊接机器人、两台焊接电源、两套机器人焊枪系统、两套焊接平台、两套气动工装夹具、一套集成控制系统、一套安全防护护栏等组成。
2.机器人焊接系统集成设备配置表:
序号名 称规 格品 牌数量单位备注
焊接机器人(含底座)R-0iB 臂展1437mm负载3KG FANUC(发那科)
MasterHyper 作为发那科机器人的战略集成商和江苏地区总经销。2套全球3大一线机器人品牌之一
2.焊接电源 Artsen-PM 400A麦格米特2台铝合金专用焊机
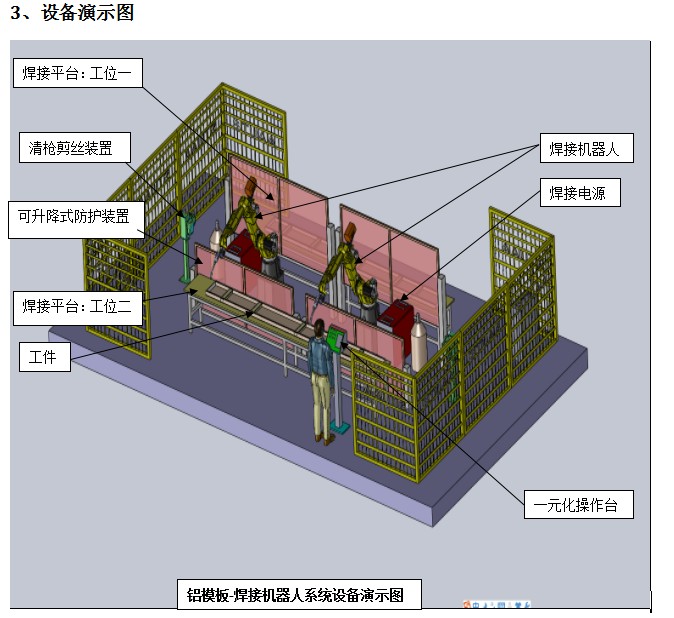
3.设备演示图如下:
主视向前左45度轴侧图:
4.操作流程:
操作人员按我司提供《作业指导书》进行机器人工作站的操作,详细操作说明请见《作业指导书》。
4.1 首先,操作人员将工件按要求装夹至1号工位的工装夹具上。
4.2操作人员在机器人系统一元化操作盒上启动机器人焊接工件,同时将工件装夹到2号工位上。
4.3焊接完成,机器人复位。
4.4进行工位2的焊接,卸下工位1的工件。
4.5依次循环操作。
三、机器人焊接工作站主要设备技术参数及特点说明
1.选用全球3大一线品牌之一的FANUC 焊接机器人 :
FANUC机器人做为世界产量最大、产品系列最全的机器人制造商之一,拥有高精密伺服的控制技术和50多年的系统集成经验,在北美超过50%的焊接机器人为发那科系统。
它也是最早落户中国,与中国制造业分享其焊接经验的厂家之一。
其弧焊切割机器人的优点总结为:
1.最长使用寿命:在美国北部制造业密集的五大湖区,有相当数量的焊接机器人使用已经超过了20年,这是世界独一无二的。
2.安全软控制:在每个机器人单元中,可以通过控制软为工作区域设置一个机器人运动的安全区域,这样可以避免机器人与设备、机器人与机器人之间产生碰撞。
3.自适应的焊接软件包:在电弧和激光跟踪的配合下可以实现完全自适应焊接。
4. 高精度运动的外部轴:源自发那科机床级精密伺服的变位机,使用全进口部件,实现高精度机器人联动,结构合理,刚性卓越,并且有自动的润滑系统。无需人工维护,实现系统控制加润滑油。变位机还带有到位机械锁死结构安全性更高。
5.激光焊缝辅助系统: 20 年的成功经验,成就机器人系统与激光跟踪系统的完美结合。
6.高速动作:市场上最快捷的机器人,高速启停,考验伺服控制的精度和使用寿命,这也是全球通用汽车车间采用发那科的原因。唯有自己研发伺服控制的企业才能将机器人技术演绎到如此极致。其他机器人品牌使用外部公司通用伺服电机+Windows系统,所无法比拟的。
7.方便的鼠标连接:编程示教盒和可以插入鼠标,实现编程操作简易。
8.可支持8个工作组,40 个轴联动。
9.无级调节旋钮:0-100%参数值无级调节与换挡调节双模式,适用于高端系统用户,也便利初级操作者。
10.专家软件库:扩展功能:起始点寻位/ 电弧上下左右跟踪/ 多层多道/ 收弧填充/ 断电重启/ 焊接横向摆动和纵向摆动/焊缝坡口宽窄自适应等。美国最大的系统集成商30年来一直选用发那科机器人用作中厚板的弧焊,正是因为发那科的强大弧焊软件支持。
11.独特的硬件可扩展性:可以扩展外部空调/稳压器/不间断电源,适用于特殊工况。
12.完善的服务网络:在中国发那科有强大的售后服务团队,其销量超过某些同业50倍,这也是在服务及备品价格方面的优势。
13.完备的培训体系:在华北、华东、华南建有专业的焊接体验中心和实验室,可以随时为客户提供工件的实验焊接。也可以接待多家客户的培训。上海发那科超过300人的工程部会是所有问题的终结地。
14.充分的备件供应:在常州有完备的机器人的备品备件库,可以做到及时更换机器人备件。任何的备品无需海外支援。真正是您买得起,用得实惠的机器人。
 机器人型号:
机器人型号:
型号: R-0iB
轴数: 6轴;
最大负载: 3KG;
重复定位精度:±0.08mm;
配置起始点寻找、电弧跟踪等弧焊软件。
发那科机器人特点介绍:
FANUC R-0iB机械部分
安装方式:倒装/正装/侧装
关节方式:6 轴关节型
最大负荷 :3公斤
运输方式:利用叉车或吊车
R-30iB 控制器部分: 中英文显示
基本配置 : Mate型箱体
电源输入: 380V / 3Φ+E
Flash ROM 模块容量: 32MB
DRAM 模块容量: 32MB
CMOS RAM 模块容量: 3MB
USB存储功能
CF卡存储功能
机器人控制电缆
示教盘电缆
备件 (保险丝, 后备电池)
软件
基本字库: 中英文
弧焊专用软件(ARC Tool:配置起始点寻找、电弧跟踪等弧焊软件等)
R-0iB机器人控制软件
数字伺服功能
操作指令功能
位置寄存器功能
我要评论

查看所有评论(总共0条)评论列表